Example 1 bluebit重力遥控小车
来自Labplus盛思维基百科
Part list:
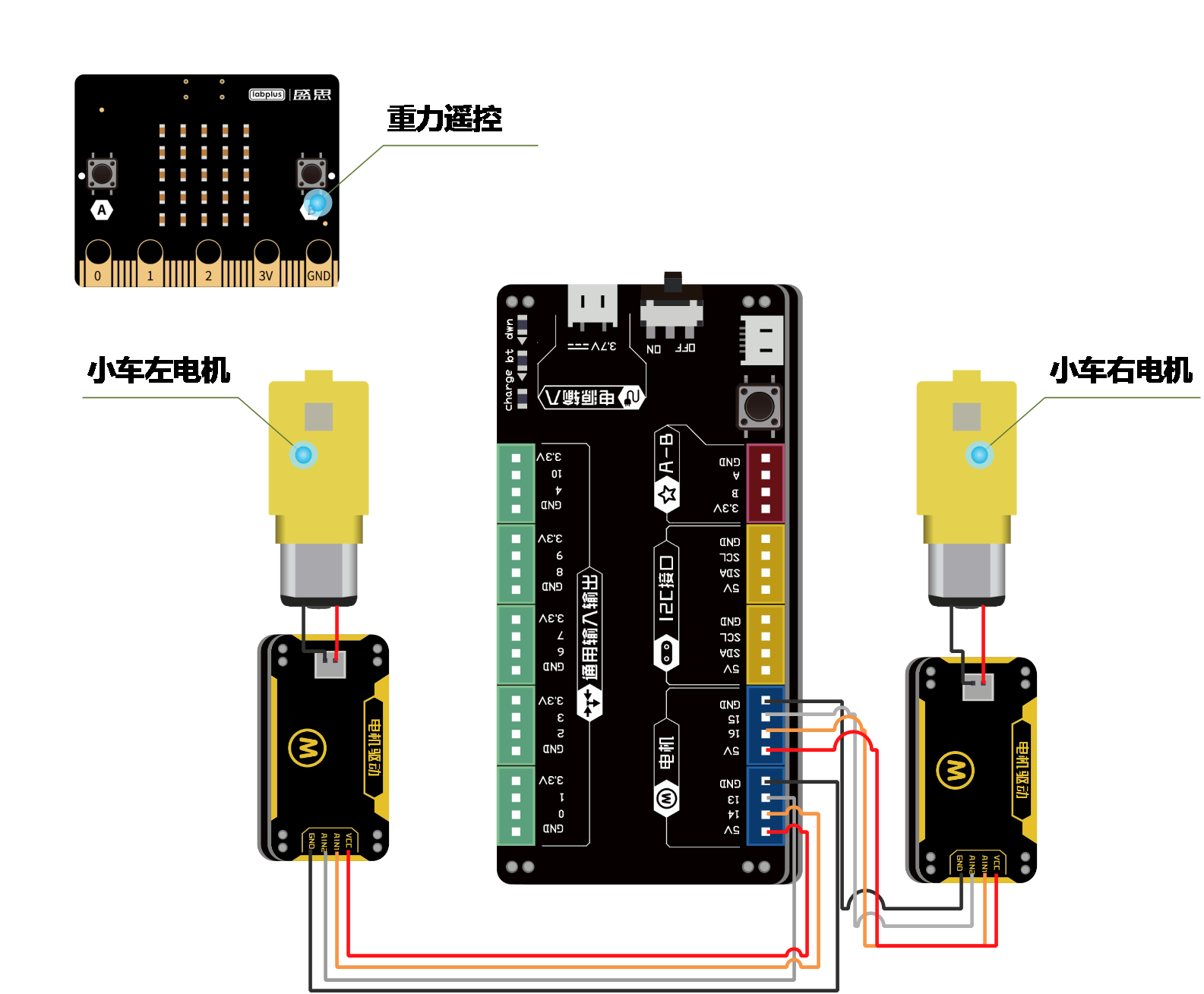
- 1x micro:bit
- 1x blue:bit-主板
- 2x blue:bit-电机驱动
Description:
通过micro:bit重力感应遥控blue:bit小车
使用方法:按下micro:bit A按键左右前后倾斜,通过2轴重力控制小车
Connection:
| 小车左电机 | AN1->P14 AN2->P13 |
| 小车右电机 | AN1->P16 AN2->P15 |
 |
Programs:
Bluebit重力小车程序
- microbit重力遥控端程序

from microbit import *
import radio
radio.on()
radio.config(length=8, queue=3, channel=79, power=7,
address=0x44773311, group=0x1B, data_rate=radio.RATE_250KBIT)
msg = bytearray(5)
x = 0
y = 0
z = 0
a = 0
while True:
x = accelerometer.get_x()
y = accelerometer.get_y()
z = accelerometer.get_z()
if button_a.is_pressed():
a=1
else:
a=0
x = x + 10000
msg[0] = int(x / 256)
msg[1] = x % 256
y = y + 10000
msg[2] = int(y / 256)
msg[3] = y % 256
msg[4] = a
radio.send_bytes(msg)
sleep(50)
- blue:bit小车程序
 |

|
from microbit import *
import radio
import math
def motion(leftSpeed, rightSpeed):
if leftSpeed > 1023:
leftSpeed = 1023
if leftSpeed < -1023:
leftSpeed = -1023
if leftSpeed == 0:
pin13.write_analog(1)
pin14.write_analog(1)
if leftSpeed > 0:
pin13.write_analog(1)
pin14.write_analog(int(leftSpeed/1.5))
if leftSpeed < 0:
leftSpeed = -leftSpeed
pin13.write_analog(int(leftSpeed/1.5))
pin14.write_analog(1)
if rightSpeed > 1023:
rightSpeed = 1023
if rightSpeed < -1023:
rightSpeed = -1023
if rightSpeed == 0:
pin15.write_analog(1)
pin16.write_analog(1)
if rightSpeed > 0:
pin15.write_analog(int(rightSpeed/1.5))
pin16.write_analog(1)
if rightSpeed < 0:
rightSpeed = -rightSpeed
pin15.write_analog(1)
pin16.write_analog(int(rightSpeed/1.5))
display.off()
radio.on()
radio.config(length=8, queue=20, channel=79, power=7,
address=0x44773311, group=0x1B, data_rate=radio.RATE_250KBIT)
x = 0
y = 0
z = 0
a = 0
left = 0
right = 0
while True:
msg = bytes(5)
msg = radio.receive_bytes()
if msg is not None:
x = msg[0]*256 + msg[1]
x = x - 10000
y = msg[2]*256 + msg[3]
y = y - 10000
a = msg[4]
#print('x=',x,'y=',y)
if a == 1:
left = int((y + x))
right = int((y - x))
print('left = ', left)
print('right = ', right)
motion(right, left)
else:
motion(0,0)